 Blender Sensor Simulation
Blender Sensor Simulation Simulation result
ATTENTION: This is not the data from the scanner of the UBER car. It is a simple approximation of a car approaching at 25 meters per second to a pedestrian with a bicycle.
Scanned with a virtual Velodyne HDL-64E. The output is the "raw" noisy scan without further calibration. Reflectivity has not been considered, but at a closer distances this should not affect the accuracy of this representation.
The scanner is mounted at a height of 2 meters above ground. This is a rough estimate of the mounting position where UBER has mounted the scanner.
Point cloud visualization
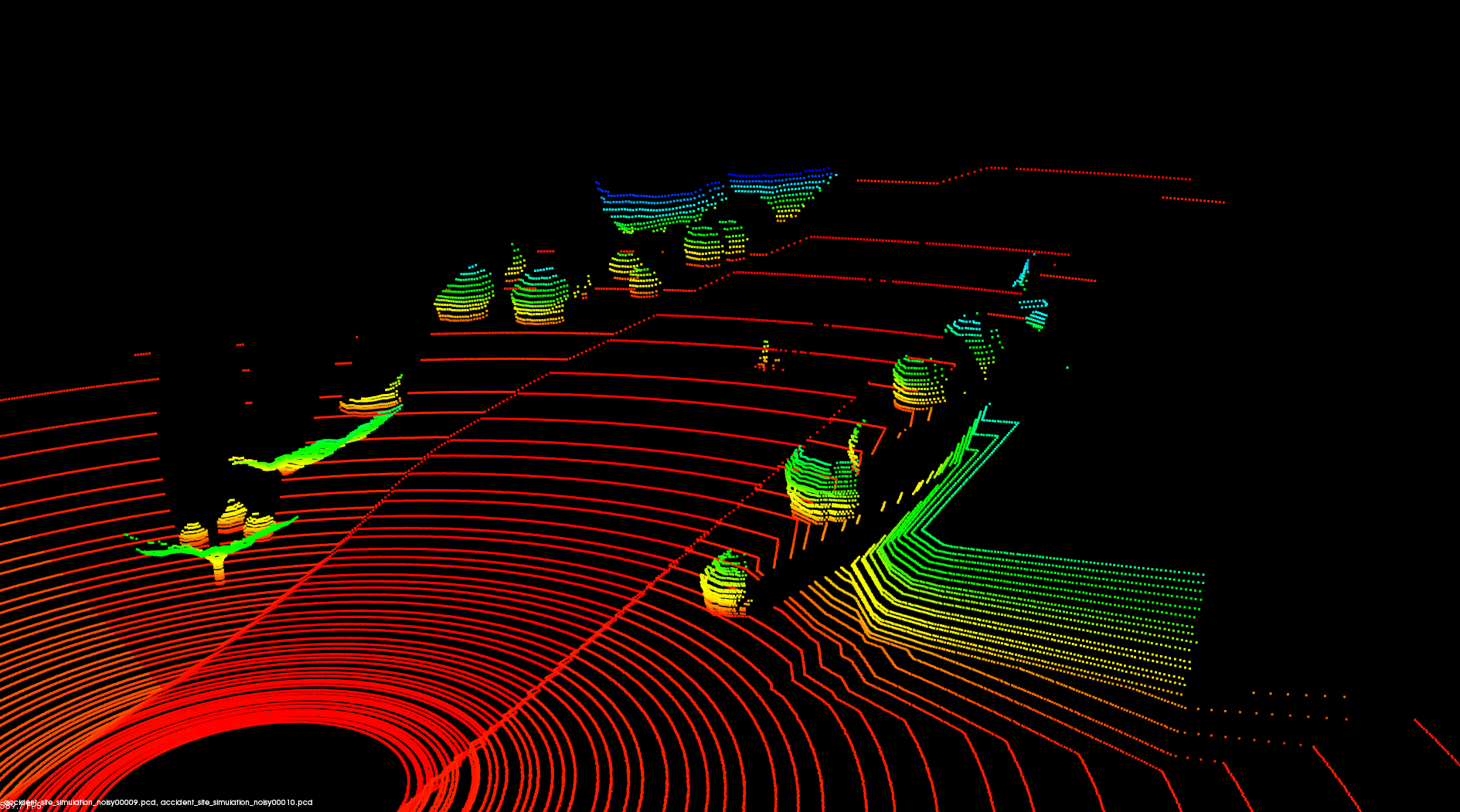
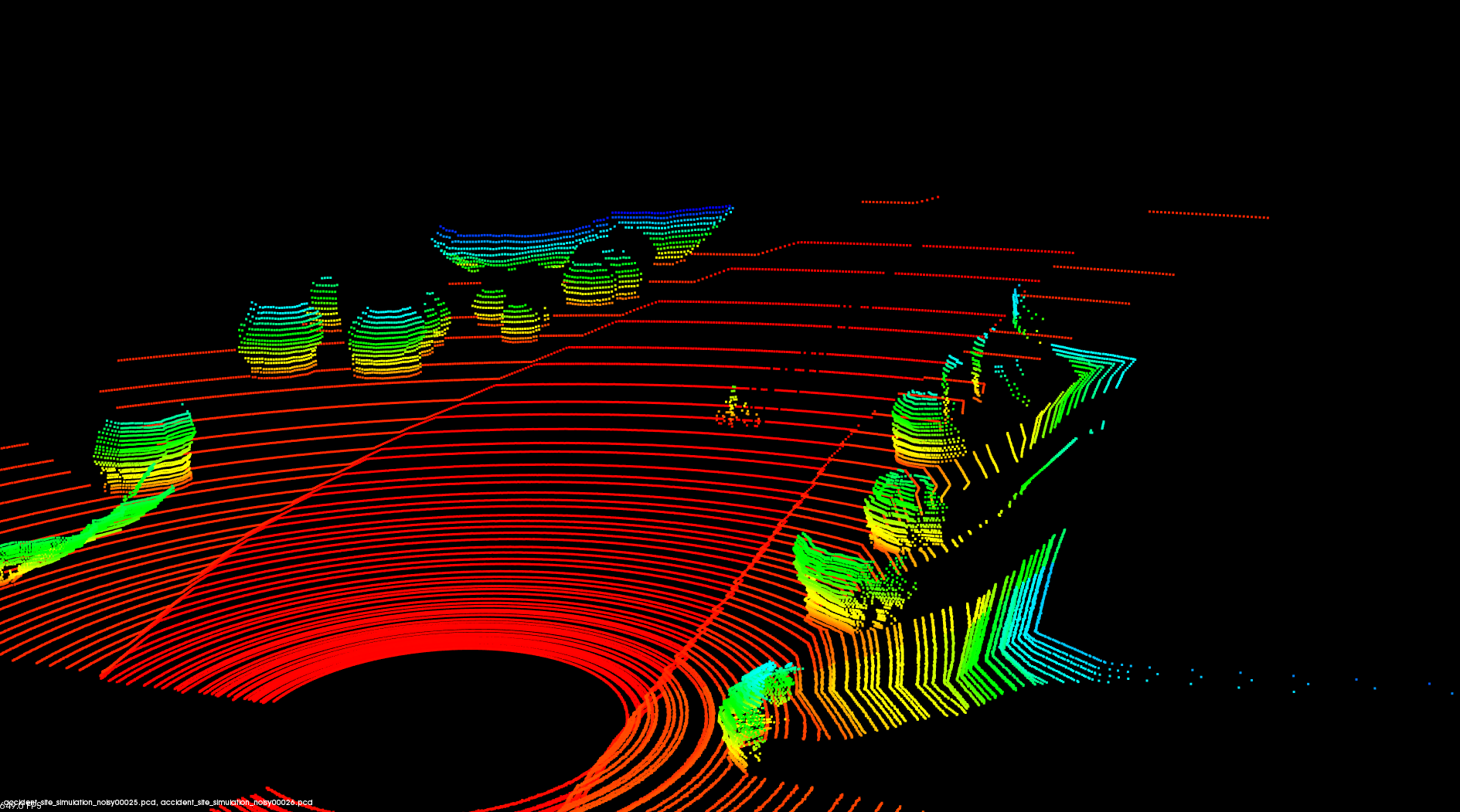
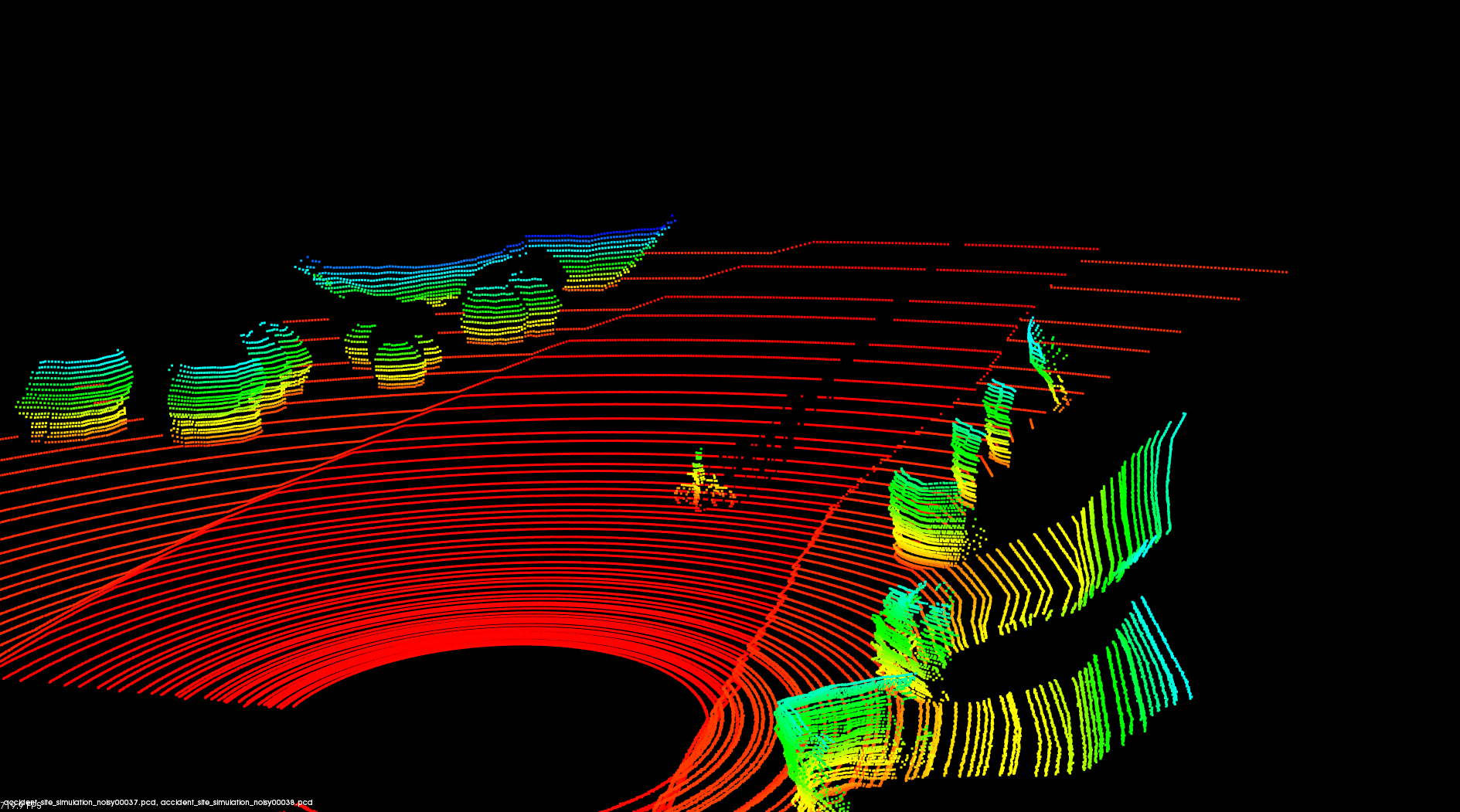
Below is a better view of the three point clouds in the video.
Distance to pedestrian: 40 meters
Distance to pedestrian: 25 meters
Distance to pedestrian: 12.5 meters
Credits
The environment is modeled after satellite images from Google Maps and views from Google Streetview.
Google Maps link to the location: 642 North Mill Avenue, Tempe, Arizona, USA
The models used are from blendswap.com
- bicycle
Name: Mountain Bike [Unibike Mission 2010] Author: hilux. Permalink: http://www.blendswap.com/blends/view/72436
- simple human figure
Name: Very Low Poly Human Basemesh Author: tweediez. Permalink: http://www.blendswap.com/blends/view/55698