 Blender Sensor Simulation
Blender Sensor Simulation Free Open Source Simulation Package for Light Detection and Ranging (LIDAR/LADAR) and Kinect sensors
The main goals of BlenSor are
- Easy integration of the modeling and the simulation environment. Model - Simulate - Analyze - Remodel - Simulate - Analyze ...
- Accessible for everyone. Free as in beer. BlenSor allows everyone to simulate the output of the major ranging technologies (Time-of-Flight, Line Laser, Rotating Laser Scanners). This allows researchers to develop algorithms for those sensors without the need to possess a sensor physically.
- Simulation of scenarios that would otherwise not be possible (i.e. accidents) Especially in autonomous driving scenarios, it is often too dangerous to test specific situations. For instance, would an algorithm detect a bicycle driver coming out from behind a house within 20 meters in front of the vehicle ? Testing this scenario in real-life either requires rigorous safety measures or might not be possible at all (which is more likely). With BlenSor, you are just a few mouse clicks away from testing this case.
- Simulating scans of big sceneries before the real world scanning is done Scanning large environments takes a lot of planning and may be rather expensive. Scanning with the wrong parameters (mounting height, angle, speed,...) or driving the wrong route may result in unusable scans and extra costs for having to do it again. With BlenSor one can roughly model the scenery and simulate the the route with the desired sensor parameters. If the results are not sufficient the parameters can be changed and the scan is run again, without wasting any resources.
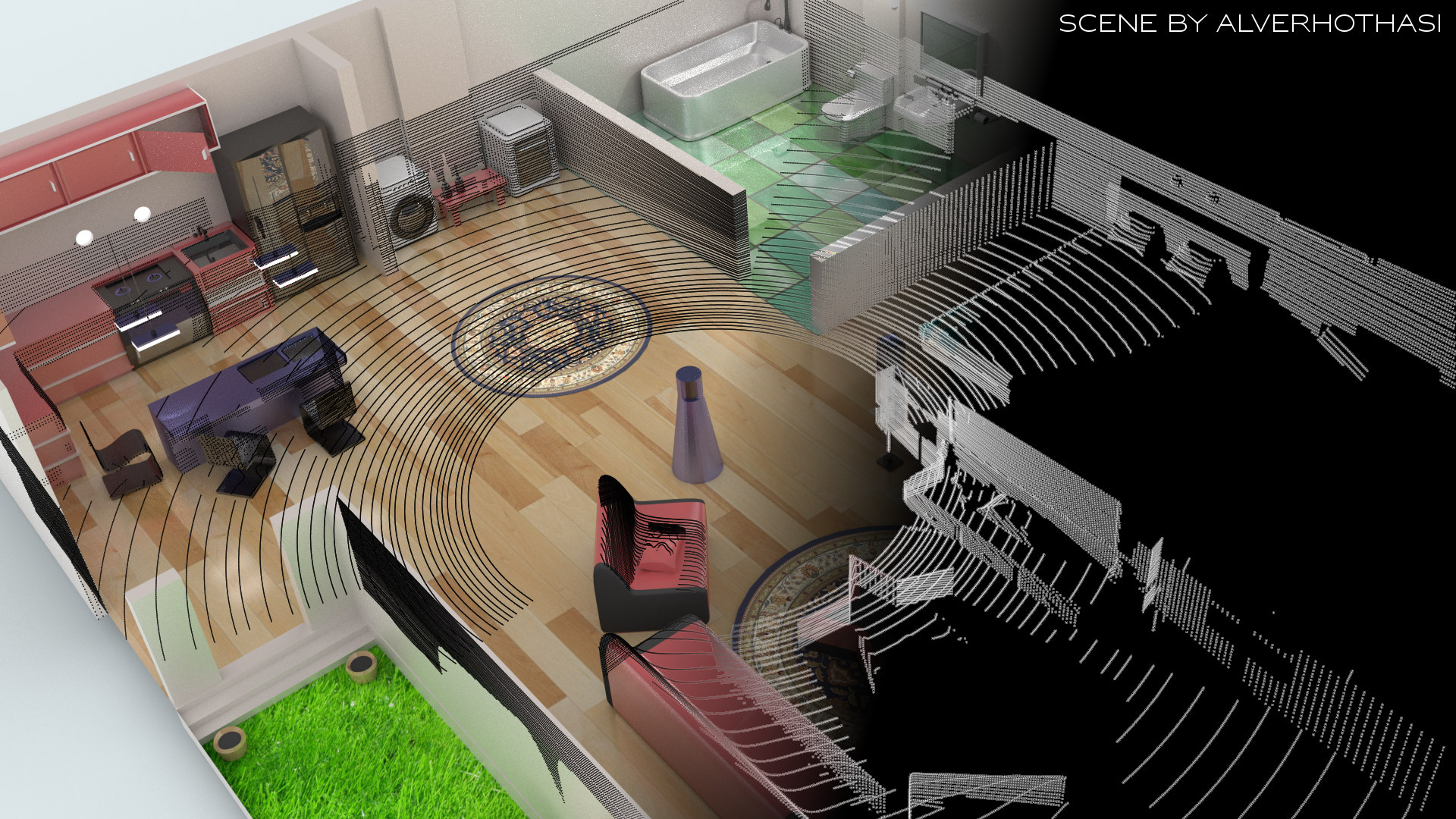
- Quantitative analysis of algorithms. BlenSor provides an exact per measurement ground truth. This supports exact analysis of obstacle detection, calibration, ground estimation, segmentation or surface reconstruction algorithms (just to mention a few).
- Repeatability of test scenarios Scenarios can be sensed over and over with slightly modified setups (for example: mounting position of the scanner or scanner type).
What BlenSor is not
BlenSor is not designed for realtime simulation Accurate simulation of complex scenarios is a time consuming task. BlenSor does not rely on the Blender (or any other) game engine and can thus simulate very complex scenarios. It is designed to produce data for offline data processing. However if you are searching for a realtime emulation of a single line laser visit MORSE or Gazebo (Stage). They are designed for Simulation of robot environments and also implement a single line laser range scanner.